Pika传火计划之读写流程

Introduction
通过上次Pika线程模型的分享,得知主要的命令处理是由线程池的线程负责的。而命令的通用处理流程主要是由PikaClientConn决定的,在其处理过程当中对于不同的命令,通过多态的方式调class Cmd处理接口,动态选择不同命令的处理函数。这里主要梳理pika的主要读写流程。
PikaClientConn和Cmd通用处理流程
WorkerThread 处理流程
class PikaClientConn: public pink::RedisConn {
void AsynProcessRedisCmds(const std::vector<pink::RedisCmdArgsType>& argvs,
std::string* response) override;
std::atomic<int> resp_num;
std::vector<std::shared_ptr<std::string>> resp_array;
std::shared_ptr<Cmd> DoCmd(const PikaCmdArgsType& argv,
const std::string& opt,
std::shared_ptr<std::string> resp_ptr);
}
Pink层通过AsynProcessRedisCmds的调用,Pika上层可以自己定义对于接受命令后的后续处理流程。
void PikaClientConn::AsynProcessRedisCmds(
const std::vector<pink::RedisCmdArgsType>& argvs, std::string* response){
BgTaskArg* arg = new BgTaskArg();
arg->redis_cmds = argvs;
arg->conn_ptr =
std::dynamic_pointer_cast<PikaClientConn>(shared_from_this());
g_pika_server->ScheduleClientPool(&DoBackgroundTask, arg);
}
1,worker thread 调用AsynProcessRedisCmds,将待处理Cmd封装成BgTaskArg。
2,BgTaskArg任务放入线程池中,后续由线程池中的一个线程继续处理这个请求。
3,worker thread 的调用返回,worker thread 继续运行自己流程。
ThreadPoolThread 处理流程
void PikaClientConn::DoBackgroundTask(void* arg) {
// sanity check
// ...
BgTaskArg* bg_arg = reinterpret_cast<BgTaskArg*>(arg);
std::shared_ptr<PikaClientConn> conn_ptr = bg_arg->conn_ptr;
conn_ptr->BatchExecRedisCmd(bg_arg->redis_cmds);
delete bg_arg;
}
void PikaClientConn::BatchExecRedisCmd(
const std::vector<pink::RedisCmdArgsType>& argvs) {
resp_num.store(argvs.size());
for (size_t i = 0; i < argvs.size(); ++i) {
std::shared_ptr<std::string> resp_ptr = std::make_shared<std::string>();
resp_array.push_back(resp_ptr);
ExecRedisCmd(argvs[i], resp_ptr);
}
TryWriteResp();
}
void PikaClientConn::ExecRedisCmd(
const PikaCmdArgsType& argv, std::shared_ptr<std::string> resp_ptr) {
std::string opt = argv[0];
slash::StringToLower(opt);
std::shared_ptr<Cmd> cmd_ptr = DoCmd(argv, opt, resp_ptr);
}
1,ThreadPoolThread调用DoBackgroundTask,检查BgTaskArg 的合法性。
2,调用BatchExecRedisCmd,在此线程中对所有命令进行逐一处理。
3,调用DoCmd 进行命令的具体处理。
4,调用TryWriteResp 对于返回的所有结果整合,之后通知WorkerThread 该PikaClientConn内的结果可以写回客户端。
DoCmd的处理流程如下。
std::shared_ptr<Cmd> PikaClientConn::DoCmd(
const PikaCmdArgsType& argv,
const std::string& opt,
std::shared_ptr<std::string> resp_ptr) {
std::shared_ptr<Cmd> c_ptr = g_pika_cmd_table_manager->GetCmd(opt);
if (!auth_stat_.IsAuthed(c_ptr)) {
c_ptr->res().SetRes(CmdRes::kErrOther,"NOAUTH Authentication required.");
return c_ptr;
}
// lock free
// slowlog_slower_thann is atomic int
if (g_pika_conf->slowlog_slower_than() >= 0) {
start_us = slash::NowMicros();
}
// lock free
// HasMonitorClients return atomic bool
bool is_monitoring = g_pika_server->HasMonitorClients();
if (is_monitoring) {
ProcessMonitor(argv);
}
// Initial
c_ptr->Initial(argv, current_table_);
if (!c_ptr->res().ok()) {
return c_ptr;
}
// partial lock free
// update server statistic lock free
// pdateTableQps NOT lock free
g_pika_server->UpdateQueryNumAndExecCountTable(
current_table_, opt, c_ptr->is_write());
// sanity check
...
// Process Command
c_ptr->Execute();
if (g_pika_conf->slowlog_slower_than() >= 0) {
ProcessSlowlog(argv, start_us);
}
}
1,根据具体命令生成其基类的std::shared_ptr<Cmd> 方便多态实现。
2,对于连接进行权限认证,对应命令可以查看Redis Auth命令,和Pika配置文件Pika配置文件说明 中对于密码的相关配置。
3,将命令放入monitor线程,对应命令可以查看Redis Monitor 命令。
4,调用Cmd::Initial。
5,调用Cmd::Execute。
6,如果开启Slowlog,则记录Slowlog,对应命令可以查看Slowlog命令。
Cmd 通用处理流程
在PikaClientConn的通用处理流程中,对于不同Cmd的操作都是调用其基类处理函数Initial和Execute,Initial和Execute函数内部会调用纯虚函数DoInitial和Do,通过多态查找派生类的真正实现。
class Cmd: public std::enable_shared_from_this<Cmd> {
virtual void DoInitial() = 0;
virtual void Do(std::shared_ptr<Partition> partition = nullptr) = 0;
void Cmd::Initial(const PikaCmdArgsType& argv,
const std::string& table_name) {
argv_ = argv;
table_name_ = table_name;
res_.clear(); // Clear res content
Clear(); // Clear cmd, Derived class can has own implement
DoInitial();
};
void Cmd::Execute() {
...
if (g_pika_conf->classic_mode()...) {
// invoke InternalProcessCommand and Cmd::Do
ProcessSinglePartitionCmd();
} else {
...
}
};
void Cmd::InternalProcessCommand(std::shared_ptr<Partition> partition,
std::shared_ptr<SyncMasterPartition> sync_partition) {
slash::lock::MultiRecordLock record_lock(partition->LockMgr());
if (is_write()) {
record_lock.Lock(current_key());
}
// invoke Cmd::Do
DoCommand(partition, hint_keys);
DoBinlog(sync_partition);
if (is_write()) {
record_lock.Unlock(current_key());
}
}
}
任何具体的命令继承Cmd之后,需要实现DoInitial和Do 两个纯虚函数。在之后的通用处理流程中Cmd会做相应的调用。Cmd对外主要暴露Initial 和Execute 两个接口。
1,Initial清除前一次调用的残留数据,同时调用DoInitial虚函数。
2,Execute判断pika运行模式,主要调用InternalProcessCommand。
2.1,对于操作DB 和Binlog 这两个动作加锁,确保DB 和Binlog 是一致的。
2.2,调用DoCommand,其内部主要调用Do 虚函数。
2.3,调用DoBinlog,将命令处理后写入Binlog。
DoCommand
DoCommand的作用主要是将命令写入DB。
void Cmd::DoCommand(
std::shared_ptr<Partition> partition, const HintKeys& hint_keys) {
if (!is_suspend()) {
partition->DbRWLockReader();
}
Do(partition);
if (!is_suspend()) {
partition->DbRWUnLock();
}
}
BGSAVE,FLUSHALL,FLUSHDB除了之外,其余所有命令在执行Do函数之前都需要加读锁。对于这几个特殊的命令而言,它们的共同点是都需要清除数据,为保证清除过程没有其它操作同时进行,需要对相应的分片或者db加上写锁阻塞其他操作。具体来说,它们Do的函数实现内部会直接调DbRWLockWriter,阻塞其它操作。
DoBinlog
DoBinlog的作用主要是将命令写入Binlog。
void Cmd::DoBinlog(std::shared_ptr<SyncMasterPartition> partition) {
Status s = partition->ConsensusProposeLog(shared_from_this(),
std::dynamic_pointer_cast<PikaClientConn>(conn_ptr), resp_ptr);
}
通过 ConsensusProposeLog => InternalAppendBinlog => (std::shared_ptr<Binlog>)Logger()->Put(binlog) 一系列的函数调用,最终调用class Binlog的Put接口将,binlog 字符串写入Binlog 文件当中。
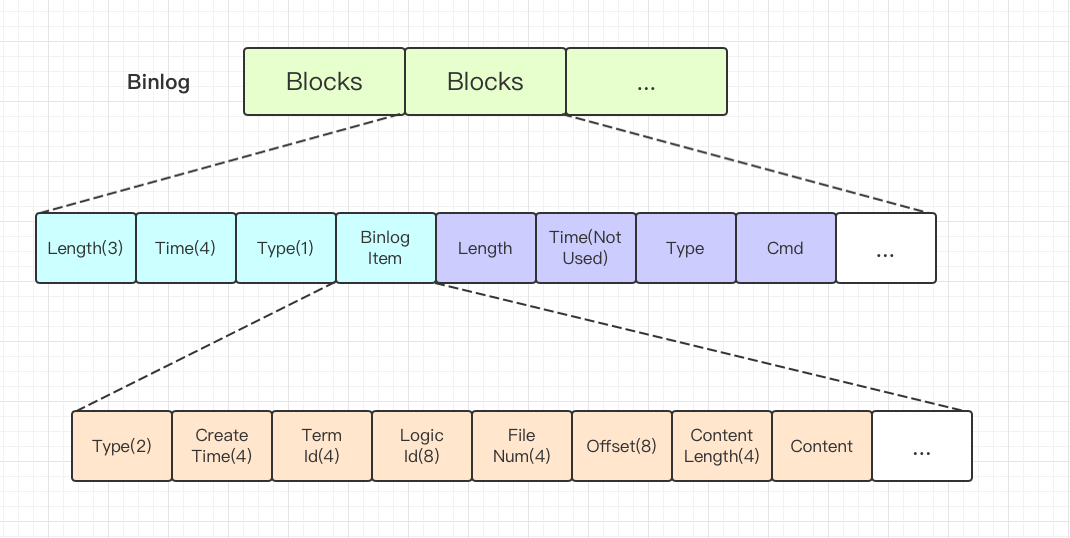
Binlog文件是由一个一个Blocks组成的,这样组织主要防止binlog文件的某一个点损坏造成整个文件不可读。每一个binlog 字符串先序列化成BinlogItem 结构,如黄色板块所示,组成BinlogItem之后,再加上8个bytes(Length,Time,Type)组成完整的可以落盘的数据。
命令执行过程的差异化处理
以上讨论了Pika的通用处理流程,所有命令的处理都要经过以上的处理流程,对于每一条命令的具体处理细节,由具体的命令实现决定。下面以SetCmd为例。
class SetCmd : public Cmd {
virtual void DoInitial() override;
virtual void Do(std::shared_ptr<Partition> partition = nullptr);
void GetCmd::DoInitial() {
if (!CheckArg(argv_.size())) {
res_.SetRes(CmdRes::kWrongNum, kCmdNameGet);
return;
}
key_ = argv_[1];
return;
}
void SetCmd::Do(std::shared_ptr<Partition> partition) {
switch (condition_) {
...
case SetCmd::kNX:
s = partition->db()->Setnx(key_, value_, &res, sec_);
break;
default:
s = partition->db()->Set(key_, value_);
break;
}
...
}
}
SetCmd的DoInitial实现主要初始化未继承自Cmd的数据。
SetCmd的Do实现主要是根据Set命令的几种变形进行不同的Blackwidow接口调用。
以上我们介绍了Pika主要的读写流程,但是在一致性场景下我们不能够完全按照以上的读写路径进行处理,下面我们来看一下一致性场景下数据的读写流程。
一致性实现中的数据写入
一致性场景下,并不是像上面所说DoCommand 和DoBinlog 在一起执行的。一致性场景下,需要在Leader的Execute中做DoBinlog,然后对于这条Binlog在得到一定数目的Follower确认之后,利用存下来的MemLog::LogItem中的PikaClientConn 和Cmd指针,调用DoExecTask,其中再次调用Execute,进行DoCommand 的操作。
由于性能考虑,DoCommand的操作需要多线程并发执行,这样一条Conn的命令就有可能被几个线程同时执行,那么如何保证运行结果的正确性呢。
在PikaClientConn 中记录了当前Conn需要执行的子命令的个数和所有子命令的response指针数组。一致性场景中会将该子命令对应的resp_ptr指针与PikaClientConn 和Cmd 存成MemLog::LogItem存下来,当这条子命令在得到一定数目的Follower确认之后,将当前LogItem执行的结果写入LogItem 中的resp_ptr 中并且resp_num 自减,执行最后一个命令的线程负责将其他所有线程的执行结果组合,返回客户端。
void PikaClientConn::BatchExecRedisCmd(
const std::vector<pink::RedisCmdArgsType>& argvs) {
resp_num.store(argvs.size());
for (size_t i = 0; i < argvs.size(); ++i) {
std::shared_ptr<std::string> resp_ptr = std::make_shared<std::string>();
resp_array.push_back(resp_ptr);
ExecRedisCmd(argvs[i], resp_ptr);
}
TryWriteResp();
}
void PikaClientConn::ExecRedisCmd(
const PikaCmdArgsType& argv, std::shared_ptr<std::string> resp_ptr) {
std::shared_ptr<Cmd> cmd_ptr = DoCmd(argv, opt, resp_ptr);
// level == 0 or (cmd error) or (is_read)
if (g_pika_conf->consensus_level() == 0
|| !cmd_ptr->res().ok() || !cmd_ptr->is_write()) {
*resp_ptr = std::move(cmd_ptr->res().message());
resp_num--;
}
}
1,调用BatchExecRedisCmd,初始化resp_num,为此次请求子命令的个数。
2,初始化resp_ptr,存入PikaClientConn指针数组,传入ExecRedisCmd。
3,在ExecRedisCmd中,调用DoCmd,如果返回正常,则等待Follower确认,再执行DoCommand。如果返回异常,直接标记当前子命令异常,并且resp_num 自减,如果是PikaClientConn 是单条命令的情况,这时候调用BatchExecRedisCmd中的TryWriteResp 就可以直接返回客户端了,没有必要同步到从。
void PikaClientConn::DoExecTask(void* arg) {
cmd_ptr->Execute();
*resp_ptr = std::move(cmd_ptr->res().message());
conn_ptr->resp_num--;
conn_ptr->TryWriteResp();
}
void PikaClientConn::TryWriteResp() {
int expected = 0;
if (resp_num.compare_exchange_strong(expected, -1)) {
for (auto& resp : resp_array) {
WriteResp(std::move(*resp));
}
resp_array.clear();
NotifyEpoll(true);
}
}
1,如果DoCmd返回正常,一致性模块会最终对于每一条子命令调用一次DoExecTask。
2,每次处理子命令都尝试TryWriteResp,只有当前resp_num 是0 才可以整合PikaClientConn中所有子命令执行结果,通知WorkerThread写回客户端。